Tom,
The cable is roughly 6" long. Some of the cables for my
stepper motors are close to it, they are just 48V so I
didnt think they would cause a problem. I am bundling them
up and moving them away to see if it helps.
Let me see if I understand correctly - E5 is sent to
the Konnect board and then it returns A5. If they don't
match it indicates noise and causes a fault?
Regarding axis 6 - I am currently not using it and it
is not configured at all in my INIT program. Should I
initialize it as you describe, even though nothing is
hooked up to it?
What does the KFLOP do when it gets this error? It
seems that I have had to restart the entire computer to
clear the fault. Is this normal? After that fault it seems
to have following errors on whatever axises are moving. Do
you think the following errors are tied to this?
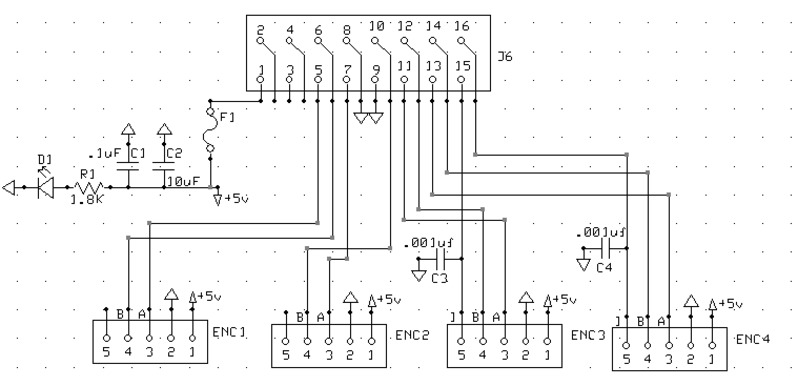
I am also getting random following errors. I have 4
encoders plugged into JP4 with a custom board that I made
(we are testing this for the first time). Could it be
possible that we are inducing noise somehow on the encoder
board that is transferred up into the Konnect board as
well? Maybe one is causing the other, or maybe isolated
problems.
Thanks,
Scott
{kind=link}